Block Based Image Matching for Image Retrieval
0x00 导言
文章地址:Science Direct
我的批注版地址:Commented Paper
这篇文章旨在解决图像检索问题中以子图搜全图的问题。
0x01 背景知识
0x00 VLAD
VLAD算法的简介可简单参考这篇论文的2.1小节All about VLAD。
VLAD是一个比较老的图像特征提取算法,过程也相对简单:
-
首先需要在训练图片数据集上训练一个码表(codebook),词表的训练方法为:对训练集中的图像提取d维的SIFT特征,然后将所有图像的所有SIFT描述子汇总在一块,使用K-means算法去做一个聚类,然后将所有聚类的中心点组合为一个码表。其中K的选择一般为64或256。在此步,我们可以将提取出的SIFT兴趣点记为,同时将训练好的码表记为,其中K为聚类中心点的个数。
-
对于一张新来的图像,首先也是提取它的SIFT特征,然后将这张图像所有的SIFT描述子根据最邻近原则分配到我们在步骤1中提取到的词表中;
-
计算这张图片SIFT描述子与它们所分配到词表的聚类中心点的残差和(即:两向量相减所得的差),这样我们就能得到一个长度为的未归一化的VLAD特征向量。公式化的表述如下:
-
对上述向量实施归一化,归一化的过程分为两步:
- 首先进行Power-law Normalization,说白了就是引入一个介于区间[0, 1)上的常数,然后在保留原始符号的情况下,对原始向量中的每一项的绝对值做次方运算,即:
- 此后对上一步的结果实施L2归一化,即为:
经过上述步骤,我们就得到了一个大小为的VLAD向量。
注:
有文章指出使用SURF算法替代上述的SIFT可以取得更好的检索效果及更快的检索速度。
0x01 Scalable Overlapping Partition algorithm (SOP)
这是一个图像分区的算法,用来将原始图像按一定规则分割为多个不同子图(block),如下是分区流程:
- 原始图像本身作为一个整体的block;
- 1x原始图像宽度,x原始图像高度,以x原始图像高度为步长做滑动窗口自上而下滑动,可得3张子图;
- x原始图像宽度,1x原始图像高度,以x原始图像高度为步长做滑动窗口自左而右滑动,可得3张子图;
- x原始图像宽度和x原始图像高度,以x原始图像高度作为步长的滑动窗口,自上而下自左而右滑动,可得9张子图;
- x原始图像宽度和x原始图像高度,以x原始图像高度作为步长的滑动窗口,自上而下自左而右滑动,可得49张子图;
上面这一套流程下来,由一张原始图片,我们就得到了65张子图。
0x02 主要贡献
- SIFT和SURF算法所计算出来的图像特征描述子,只关注了梯度特征而忽略了颜色特征,本文对二者做了一个结合,提出了一种新型的复合描述子SURFCN,这使得提取出来的特征具有更强的区分性。最终,这个组合特征将被编码为一个VLAD矩阵。
- 为了实现基于子图的图像检索,本文把上述VLAD矩阵与用于表述空间信息的神经特征做了一个结合,这个结合体我们称之为视觉短语(visual phrase)。
- 在检索阶段,我们会对每个图像的子图创建子图索引(block index)。检索时,我们会同时考虑词汇表的相似度和子图的相似度。
0x03 方法论
0x00 简介
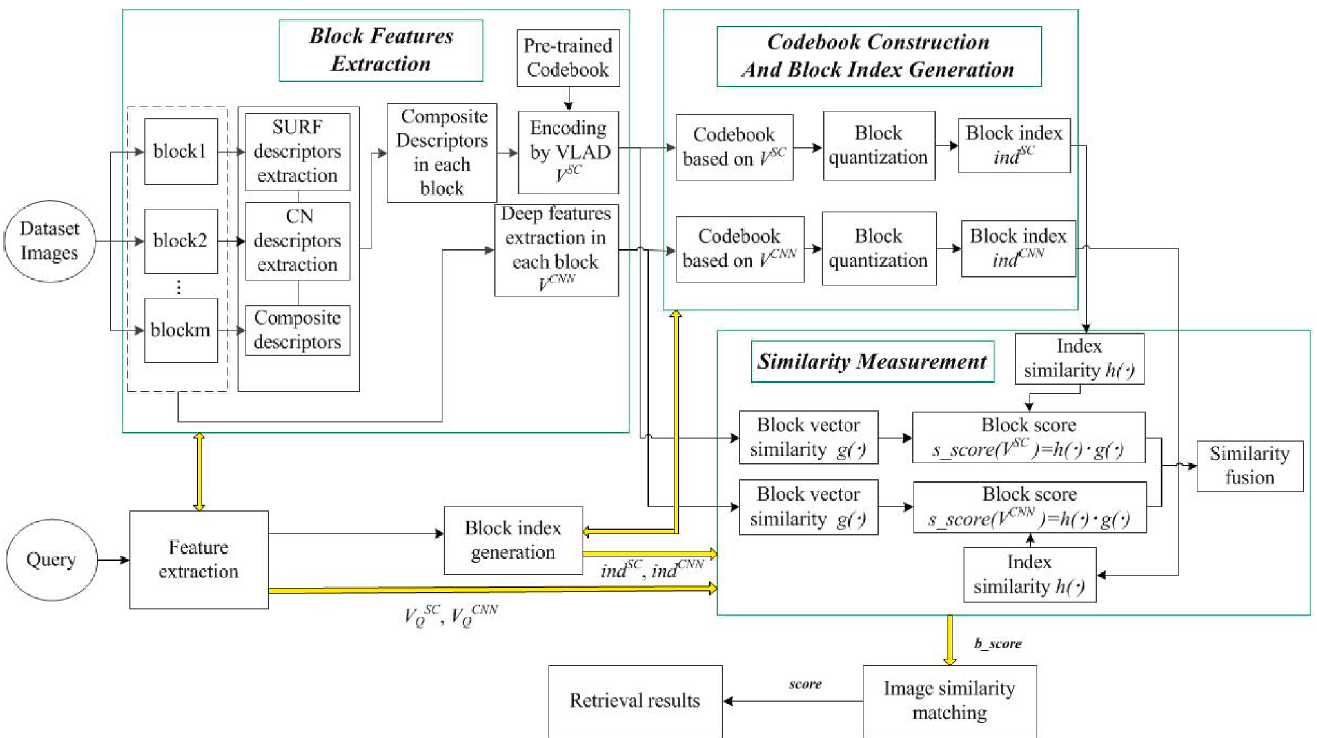
如上图所示,整个流程将分为如下三个模块:
- 块特征提取(Block features extraction):首先使用SOP算法对输入图像进行分区,然后对每个分区提取它们的SURF描述子以及CN(Color Names)描述子,然后再将SURF描述子和CN描述子进行一个整合,整合后的结果称之为组合描述子(Composite Descriptor)。最终将这个组合描述子使用一个VLAD模型将其编码为一个向量。同时,提取每个分区的深度特征。这些共同构成这个子图的块特征(Block Feature)。
- 构建码表和块索引(Codebook construction and block index generation):在训练数据集上,依据VLAD模型编码后的组合描述子和深度特征,使用k-means聚类算法,分别构建两个码表。然后再将新来图片的块特征分配到码表中与之最近的词汇上。
- 基于块的相似度测量(Block-based similarity measurement):根据块索引的相似度与块特征的相似度计算一个块匹配度(block matching score),一张图片所有子图的块匹配度就是这张图片与目标图片的匹配程度。
0x01 组合描述子(Composite Descriptor)
组合描述子在计算的时候会同时考虑它的梯度特征和颜色特征,梯度特征使用SURF算法来进行提取,颜色特征则使用CN描述子来进行表述。我们基于如下3点考虑选择了CN描述子:
- CN描述子与颜色的色度(shade)无关,也就是说,对于同一个颜色的不同色度,其计算出的描述子的值是相同的。深红和浅红就是同一种颜色的两种不同色度。
- CN描述子可以用来表示无彩色(achromatic color),无彩色指除了彩色以外的其它颜色,常见的有黑、白、灰。明度从0变化到100,而彩度很小接近于0。
- CN描述子是一种紧凑表示,也就是说占用的空间很少。
对于一张图片,我们首先提取它的SURF描述子,记为,其中n为所提取出的SURF描述子的个数,对于其中任一SURF描述子,我们以其为中心做一个的正方形,然后提取这一区域内所有像素的CN描述子,然后我们计算这些CN描述子向量的均值作为这一区域的CN描述子向量。然后对于n个SURF描述子,我们就有了与之对应的n个CN描述子,将其记为。此后,我们引入两个权重系数来将如上两个向量前后相接拼起来,得:,其中,我们在设置这两个权重系数时,我们使。这样,我们假设为SURF描述子的维度,为CN描述子的维度,那么对于其中某一个组合描述子的维度即为。
0x02 块索引(Block Index)
对于一张图片,我们首先将其分成S个block,对于其中的一个block s,我们提取其组合描述子,并将其记为,然后我们再将所有的组合描述子使用VLAD算法进行编码,并将其结果记为。此外,我们还会对这张图片整体提取其深度特征,并记为。我们首先对训练集中的所有图片,提取上述的2种特征,此后使用K-means算法将其聚合到k个类别中。然后使用K-means的聚类中心点组成我们的词汇表(codebooks,码表),对于这个训练数据集中所有图像的组合特征向量和深度特征向量,我们就可以将其所对应的全体的聚类中心记为和。
对于某一张图片s的组合特征向量和深度特征向量,我们就可以计算出它们与码表中所有聚类中心点的距离,并选出与之距离最近的m个()聚类中心点(记为:)在码表中的索引作为对特征向量和的索引向量,也就是块索引,并将其记为与。
的原因是m个聚类中心,每个聚类中心用一个数字来进行标号。
这么做的主要意图如下:
其一,降低检索时间。在检索的过程中,我们会首先提取待检索图片与数据库中目标图片的块索引,然后判断二者是否有交集。如果没有的话,那就是完全不相似,并且在此次检索过程中应该被筛除掉。论文作者在Holidays dataset中试验,发现这一步可以在检索过程中预先筛掉15%的图片。
其二,可以对仅使用图像特征检索的结果做一个加强,去掉一些被图像特征检索错误召回的图片。
0x03 相似度评价(Similarity Measurement)
假设现在有2张图片和,将其切分为S个子图后的图像表示为以及。其中的每一项都是每一个block的特征,如果写成就可以表示第一张图片第一个block的SURFCN特征,以此类推,即为第一张图片第一个block的组合特征。为了提高相似判断的准确率,我们使用块索引和特征向量的组合相似度来进行相似性评价。对于两张图片内的两个block,我们使用如下公式来计算其相似度(similarity score):
其中,表示第一张图片的第s个block的特征,同理。和分别表示两个block的块索引所对应的聚类中心点。和分别代表两个相似度评价函数,如下:
其中,表示二者之间的欧几里得距离,m即为我们在块索引一节选出的与之距离最近的m个聚类中心点的个数m。
s_score的取值范围应介于区间,分数越大,则两张图片的相似度也就越高。
随着两个block相似度的提高,两个block应该被划分到聚类中心点集的交集也就会随之增多,点集之间的欧几里得距离也就会随之减小并趋向于0,则计算公式左边的部分将随之增大并趋向于1。同理,两个block的组合描述子特征之间的欧几里得距离也将趋向于0,公式右边的的值也将随之增大并趋向于1。因此对于整体来说,相似度越高,s_score的得分越大。
同时,我们还可以给组合特征和深度特征之间加上一个对最终相似度得分计算的影响权重,这两个权重则即为和,其需要遵循,由此我们可以得到b_score的计算公式,如下所示:
最终,我们对一张图像所切分出来的S个block的相似性求和,即可得到两张图像之间的相似性,我们将其即为score,公式如下:
0x04 Block-based Image Matching (BBIM) Algorithm
离线过程
- 在训练数据集上依据所有图片所有block的SURFCN描述子训练码表,并采用VLAD算法将其编码,记为:
- 把一张图片I分成S个block
- 提取每一个block的SURF描述子
- 围着上一步提取的SURF描述子,提取以其为中心的一个近邻矩阵内的CN描述子
- 组合SURF描述子和CN描述子,组合描述子又称为SURFCN (SC)描述子
- 对每一个block的组合描述子,使用VLAD算法编码为一个向量
- 提取每个block的深度特征,记为
- 在待检索的图像数据集上基于和分别训练一个码表,记为和
- 为每一个block依据组合描述子特征和深度特征创建一个块索引,记为和
检索过程
- 将待检索的图片Q分为S个block
- 提取每一个block的SURF描述子CN描述子,并将其组合为SURFCN描述子
- 对每一个block s的SURFCN描述子进行VLAD编码,得向量
- 提取每个block的深度特征,记为
- 对每一个block依据离线过程中训练的码表和计算出其块索引向量
- 计算此图片与待检索数据集中所有图片的相似性score
- 从数据集中返回前p张相似性得分最高的图片
0x04 实践论
作者在实践过程中,对图像提取的是dense SURF descriptors,并在以每一个描述子为中心的周围一个4x4的矩阵内提取的CN描述子。作者在A数据内预训练一个码表,然后使用B数据集内的图片作为待检索目标数据集以及检索数据集。对于深度特征的提取,作者选用的是VGG-f模型,抽取其第二个全连接层的输出,输出为一个4096维的向量的。
对于组合描述子计算中的SURF描述子和CN描述子所占权重问题,作者进行了探究。发现在holidays数据集上,时,检索的mAP最高,最高为0.7373。但是在Oxford5K数据集上,由于大部分建筑物的颜色特征都差不多,导致CN描述子在不相似图片上的区分度并不高,继而导致当取值时,并不能取得最好的检索效果。经试验得知,在Oxford5K数据集上,取值时,检索效果最好,mAP最高为0.3899。
作者同样对在进行VLAD编码过程中,进行power-law normalization时的常量的选取对检索结果的影响做了探究,发现最佳的取值应介于0.1-0.6之间。VLAD编码出来原始向量有4800维,作者同样对使用PCA算法对原始VLAD向量进行降维和白化对其mAP的影响做了探究。在Holidays数据集中的结果如下图所示:
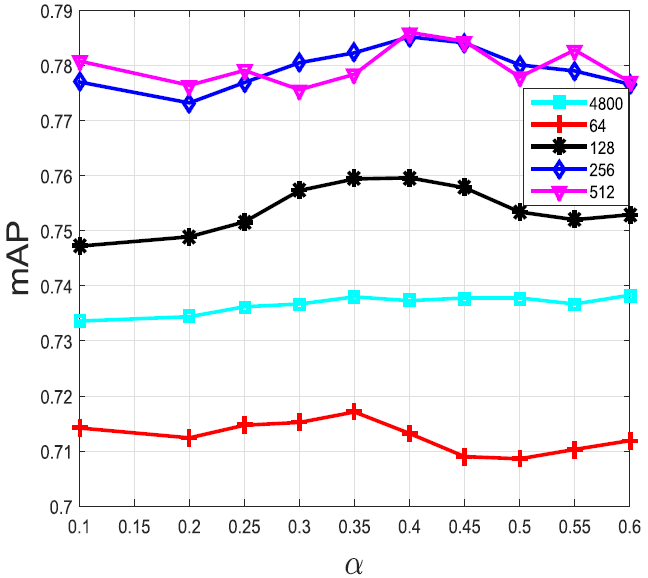
其中每条不同的线后面的数字为使用PCA算法降维后的维度,4800为原始向量。
作者还对计算b_score时,组合特征和深度特征的s_score的权重和对检索mAP的影响做了探究。在Holidays数据集上的测试结果是,当依据SURFCN描述子预训练的码表的大小(聚类中心的个数)为64时,和的值均为0.5时,检索的mAP最好,最高为0.8261。
在进行检索的过程中,作者发现,有一些图片的block可能没有特征可以提取,对于这样的block将会在检索过程中被丢弃。用于VLAD编码SURFCN特征所训练的码表大小为64,用于建立块索引时所训练的码表大小为2048。在Holidays数据集中,如果单纯地将图片分块后使用VLAD编码后的SURFCN描述子进行检索,mAP为0.7579,如果单纯地使用深度特征进行检索,mAP为0.7885。如果将两个特征按前文所述方法进行组合,然后使用组合特征进行检索,mAP为0.8351。
 支付宝
支付宝- 微信